3.5. Výpočet jmenovitého proudu – Uživatelská příručka 8SMC4-USB
Jmenovité proudy uvedené v tabulce se vztahují na normu třífázové čtyřpólové asynchronní elektromotory s rotorem nakrátko (1500 ot./min při 50 Hz). Tyto hodnoty jsou orientační a mohou se lišit v závislosti na výrobci, konstrukci, počtu fází a pólů. barva Zvýrazněné hodnoty jsou v souladu s normou EN IEC 60947-4-1 (příloha G).
| Výkon elektromotoru, kW | Jmenovitý proud elektromotoru v závislosti na napětí, A | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 220V | 230V | 240V | 380V | 400V | 415V | 440V | 500V | 660V | 690V | |
| 0,06 | 0,37 | 0,35 | 0,34 | 0,21 | 0,2 | 0,19 | 0,18 | 0,16 | 0,13 | 0,12 |
| 0,09 | 0,54 | 0,52 | 0,5 | 0,32 | 0,3 | 0,29 | 0,26 | 0,24 | 0,18 | 0,17 |
| 0,12 | 0,73 | 0,7 | 0,67 | 0,46 | 0,44 | 0,42 | 0,39 | 0,32 | 0,24 | 0,23 |
| 0,18 | 1 | 1 | 1 | 0,63 | 0,6 | 0,58 | 0,53 | 0,48 | 0,37 | 0,35 |
| 0,25 | 1,6 | 1,5 | 1,4 | 0,9 | 0,85 | 0,82 | 0,74 | 0,68 | 0,51 | 0,49 |
| 0,37 | 2 | 1,9 | 1,8 | 1,2 | 1,1 | 1,1 | 1 | 0,88 | 0,67 | 0,64 |
| 0,55 | 2,7 | 2,6 | 2,5 | 1,6 | 1,5 | 1,4 | 1,3 | 1,2 | 0,91 | 0,87 |
| 0,75 | 3,5 | 3,3 | 3,2 | 2 | 1,9 | 1,8 | 1,7 | 1,5 | 1,15 | 1,1 |
| 1,1 | 4,9 | 4,7 | 4,5 | 2,8 | 2,7 | 2,6 | 2,4 | 2,2 | 1,7 | 1,6 |
| 1,5 | 6,6 | 6,3 | 6 | 3,8 | 3,6 | 3,5 | 3,2 | 2,9 | 2,2 | 2,1 |
| 2,2 | 8,9 | 8,5 | 8,1 | 5,2 | 4,9 | 4,7 | 4,3 | 3,9 | 2,9 | 2,8 |
| 3 | 11,8 | 11,3 | 10,8 | 6,8 | 6,5 | 6,3 | 5,7 | 5,2 | 4 | 3,8 |
| 4 | 15,7 | 15 | 14,4 | 8,9 | 8,5 | 8,2 | 7,4 | 6,8 | 5,1 | 4,9 |
| 5,5 | 20,9 | 20 | 19,2 | 12,1 | 11,5 | 11,1 | 10,1 | 9,2 | 7 | 6,7 |
| 7,5 | 28,2 | 27 | 25,9 | 16,3 | 15,5 | 14,9 | 13,6 | 12,4 | 9,3 | 8,9 |
| 11 | 39,7 | 38 | 36,4 | 23,2 | 22 | 21,2 | 19,3 | 17,6 | 13,4 | 12,8 |
| 15 | 53,3 | 51 | 48,9 | 30,5 | 29 | 28 | 25,4 | 23 | 17,8 | 17 |
| 18,5 | 63,8 | 61 | 58,5 | 36,8 | 35 | 33,7 | 30,7 | 28 | 22 | 21 |
| 22 | 75,3 | 72 | 69 | 43,2 | 41 | 39,5 | 35,9 | 33 | 25,1 | 24 |
| 30 | 100 | 96 | 92 | 57,9 | 55 | 53 | 48,2 | 44 | 33,5 | 32 |
| 37 | 120 | 115 | 110 | 69 | 66 | 64 | 58 | 53 | 40,8 | 39 |
| 45 | 146 | 140 | 134 | 84 | 80 | 77 | 70 | 64 | 49,1 | 47 |
| 55 | 177 | 169 | 162 | 102 | 97 | 93 | 85 | 78 | 59,6 | 57 |
| 75 | 240 | 230 | 220 | 139 | 132 | 127 | 116 | 106 | 81 | 77 |
| 90 | 291 | 278 | 266 | 168 | 160 | 154 | 140 | 128 | 97 | 93 |
| 110 | 355 | 340 | 326 | 205 | 195 | 188 | 171 | 156 | 118 | 113 |
| 132 | 418 | 400 | 383 | 242 | 230 | 222 | 202 | 184 | 140 | 134 |
| 160 | 509 | 487 | 467 | 295 | 280 | 270 | 245 | 224 | 169 | 162 |
| 200 | 637 | 609 | 584 | 368 | 350 | 337 | 307 | 280 | 212 | 203 |
| 250 | 782 | 748 | 717 | 453 | 430 | 414 | 377 | 344 | 261 | 250 |
| 315 | 983 | 940 | 901 | 568 | 540 | 520 | 473 | 432 | 327 | 313 |
| 355 | 1109 | 1061 | 1017 | 642 | 610 | 588 | 535 | 488 | 370 | 354 |
| 400 | 1255 | 1200 | 1150 | 726 | 690 | 665 | 605 | 552 | 418 | 400 |
| 500 | 1545 | 1478 | 1416 | 895 | 850 | 819 | 745 | 680 | 515 | 493 |
| 560 | 1727 | 1652 | 1583 | 1000 | 950 | 916 | 832 | 760 | 576 | 551 |
| 630 | 1928 | 1844 | 1767 | 1116 | 1060 | 1022 | 929 | 848 | 643 | 615 |
| 710 | 2164 | 2070 | 1984 | 1253 | 1190 | 1147 | 1043 | 952 | 721 | 690 |
| 800 | 2446 | 2340 | 2243 | 1417 | 1346 | 1297 | 1179 | 1076 | 815 | 780 |
| 900 | 2760 | 2640 | 2530 | 1598 | 1518 | 1463 | 1330 | 1214 | 920 | 880 |
| 1000 | 3042 | 2910 | 2789 | 1761 | 1673 | 1613 | 1466 | 1339 | 1014 | 970 |
Aby krokový motor produkoval maximální točivý moment bez přehřátí, je důležité správně nastavit takové technické charakteristiky, jako je jmenovitý proud.
Čím větší je proud ve vinutí motoru, tím větší je točivý moment na ose. Je důležité si uvědomit, že se zvýšením proudu protékajícího vinutím se zvyšuje generovaný tepelný výkon motoru. Aby motor fungoval po dlouhou dobu, musí být generovaný tepelný výkon (Joule-Lenzův zákon) menší než rozptýlený výkon. Ztrátový výkon lze vypočítat na základě dokumentace motoru.
3.5.1. Výpočty založené na parametrech unipolárního celokrokového režimu¶
Ztrátový výkon se rovná
[P = n cdot R_u I_u^2,]
kde (R_u) je odpor vinutí v unipolárním režimu, (I_u) je proud procházející jedním vinutím v unipolárním režimu, (n) je počet současně pracujících vinutí.
Vezměme si jako příklad ST2818M1006. Tabulka v dokumentaci ukazuje, že v celokrokovém režimu pracují dvě vinutí (n = 2) současně v unipolárním režimu, tzn. (P = 2 R_u I_u^2) . Regulátory motoru podporují pouze bipolární režim řízení. Pro přepnutí z unipolárního do bipolárního režimu zapojíme vinutí každé fáze do série, odpor se zvýší, (R_b = 2 R_u), kde (R_b) je odpor sériově zapojených vinutí pro bipolární režim řízení.
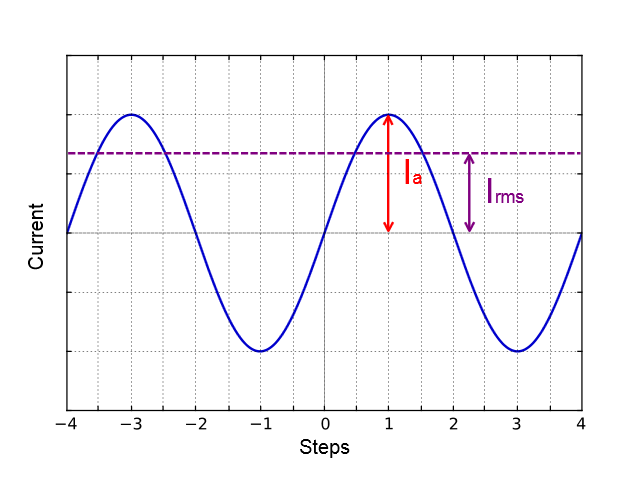
Řídicí algoritmus v ovladačích motoru pracuje v režimu mikrokrokování a udržuje proud tak, že v jednom vinutí se proud mění podle funkce (I_a sin(phi)), ve druhém vinutí se proud mění podle funkce (I_a cos(phi) )), kde (I_a) – amplituda proudu. Tepelná energie generovaná dvěma vinutími v libovolném okamžiku
[P = R_b I_a^2 sin^2(phi) + R_b I_a^2 cos^2(phi) = R_b I_a^2]
Porovnáním mocnin získáme rovnici, ze které zjistíme, že (I_a = I_u) .
3.5.2. Výpočty založené na bipolárních celokrokových parametrech¶
Ztrátový výkon je roven (P = n cdot R_b I_b^2), kde (R_b) je odpor vinutí v bipolárním režimu, (I_b) je proud procházející jedním vinutím v bipolárním režimu, n je počet současně pracujících vinutí .
Vezměme si jako příklad ST2018S0604. Tabulka v dokumentaci ukazuje, že v celokrokovém režimu pracují dvě vinutí (n = 2) současně v bipolárním režimu, tzn. (P = 2 R_b I_b^2).
Tepelná energie generovaná na vinutí motoru řízená ovladači motoru je stále
[P = R_b I_a^2 sin^2(phi) + R_b I_a^2 cos^2(phi) = R_b I_a^2]
Rovnici získáme zrovnoprávněním mocnin (2 R_b I_b^2 = R_b I_a^2) . Zjistíme, že (I_a = sqrt cdot I_b) .
3.5.3. Vztah k RMS Current¶
Střídavý proud v každém vinutí motoru lze charakterizovat jeho efektivní hodnotou za dané období
[já_ = sqrt intlimits_0^ (I_a sin(phi))^2 , mathrmphi> = frac>]
Tepelná emise jeden vinutí je přes něj spojeno s efektivním proudem (P_1 = R_b I_^2). Obě vinutí jsou identická (P_1 = P_2). Celkový tepelný výkon motoru pod kontrolou regulátoru motoru (P = P_1 + P_2 = 2 R_b I_^2).
Z výše uvedeného vyplývá, že (I_ = frac>) a také (I_ = I_b) .
3.5.4. Nastavení jmenovitého proudu¶
Regulátory motoru jsou schopny přijímat hodnotu jmenovitého proudu jako amplitudu proudu Ia nebo jako efektivní hodnotu Irms. Volba způsobu interpretace vstupní hodnoty jmenovitého proudu je určena nepřítomností/přítomností příznaku `ENGINE_CURRENT_AS_RMS` v poli. EngineFlags nastavení motoru struktur. Při nastavování jmenovitého proudu v XILab musíte správně specifikovat metodu interpretace proudu. V tomto případě budou ovladače motoru poskytovat maximální přípustný točivý moment, aniž by došlo k přehřátí motoru.
U všech motorizovaných polohovadel Standa obsahují připravené konfigurační soubory jmenovitý proud určený efektivní hodnotou. Je nastaven odpovídající příznak. Motory tak pracují s optimálními parametry.
© Copyright 2018, Standa